Repositories: SOON
TMI uses a WWVB receiver in its RWS product. WWVB is a radio station operated out of Ft. Collins, CO by NIST, which provides a 60Hz carrier wave on which is encoded the current time as synchronized with a pair of on-site atomic oscillators. The low frequency of the WWVB broadcast means it is available through most of North America. Perhaps you have heard of Atomic Clock radios. These simply incorporate a WWVB receiver which is then used to automatically set, and periodically compensate, the radio's internal real time clock circuitry.
TMI's RWS (Remote Weather Station) project collects weather data completely autonomously, time-stamping recorded data using its onboard RTC. The WWVB broadcast is used to both initially set the RTC, and to periodically compensate for its drift over time.
TMI chose to incorporate the C-MAX CMMR-6 WWVB receiver into its RWS design. This simple board requires very little power, and the fact that the WWVB receiver need only be consulted occasionally to compensate for RTC drift means its time averaged power consumption is very low. The CMMR-6 offers a simple output, TCO, treated as a digital signal. TCO is logic high when the WWVB carrier is transmitting at full power, and is logic low when the WWVB carrier is transmitting at reduced power. Each second uses a variable period in which the carrier is at reduced power to encode one of three values: a 0 bit, a 1 bit, and a frame marker. 60 of these tri-state bits form a time frame containing the time, to the minute, during the current frame transmission. More about the WWVB signal format is available here.
While the WWVB time code format is easy to parse, this is not so true in the presense of noise. TMI has chosen to address noise by implementing a digital 4th order Butterworth filter, using a 32Hz sample rate and a 3 Hz cutoff frequency. The filter inputs are either 0.0 and 1.0, sampled from the CMMR-6 TCO pin, and the filter output is some fraction inclusive of the range 0.0 through 1.0. The microprocessor code implements hysteresis to generate a digital output, where outputs >= 0.7 are treated as logic 1, outputs <= 0.3 are logic zero, and any value in between these thresholds leave the logic output unchanged. This filter, implemented within the uC, requires up to 5% of the CPU while WWVB is in operation, but does a stellar job at cleaning up the WWVB signal. To evaluate filters and generate their implementation logic, we used the simple and easy to use Fiview design tool.
Consider the following oscilliscope capture of live WWVB reception. TCO is the output from the CMMR, and FOUT is the output from the digital filter. Note that the filter delays the signal by approximately 200 ms.
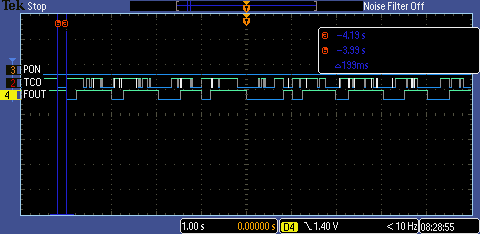
As mentioned earlier, the duration of the low period indicates the bit type. 200 ms for bit 0, 500 ms for bit 1, and 800 ms for a frame mark. As can be seen in the TCO trace, there is a significant amount of relatively high frequency noise interfering with the TCO signal. A discrete algorithm would likely be unreliable in decoding TCO. However, the filtered output, FOUT, successfully removed all the noise with minimal signal distortion. A discrete algorithm can parse FOUT with a high degree of reliability. In this case, the trace as decoded -- 0 0 1 0 M 0 0 1 1 -- was the correct sequence for the captured frame.
The decode algorithm determines a bit value for the current low period duration that is best matched by the expected durations. But the low pass filter cannot remove all sources of error, so a frame may be received with bits in error. Frames are validated according to the WWVB time code format, and two frames must have matching data to consider a valid time acquisition. Of course in this sense, matching frames do not have the exact same values, but the second frame's contents differ from the first frame's only by the number of minutes separating their acquisition.
There are still a few enhancements possible in this design. First, the TCO signal could be captured via an ADC, to bring additional information on each bit into the filter. This, however, might require some software gain control depending upon how good the CMMR-6 AGC circuitry is, and may not be worth the effort.
The second enhancement is one that will be implemented. Instead of matching two complete frames to indicate valid aquisition, instead match complete frame sections. Three incoming frames all with errors in different sections would allow this latter approach to construct a known good frame, where the current algorithm could not. In very noisy cases, this enhancement should perform better.